Exercices ( Série 2) corrigés sur le Critère de Stabilité de Routh
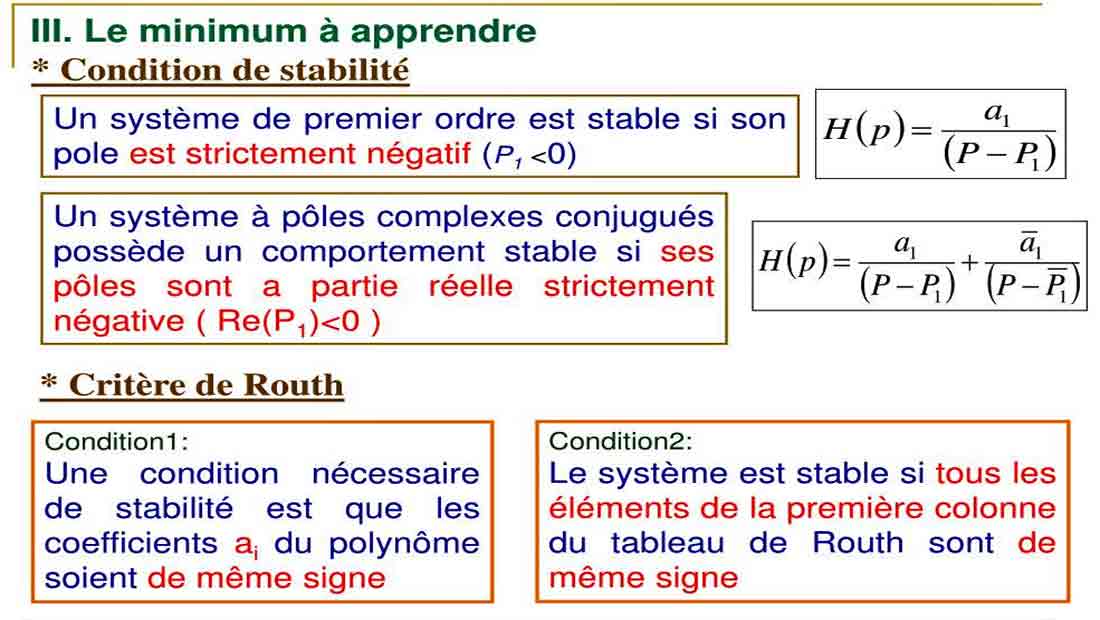
Stabilité d’un système asservi : Un système est dit stable si sa réponse libre (lorsque l’entrée présente un retour à zéro, comme une impulsion de Dirac, un créneau…) tend vers zéro, quand t → ∞. Un Système Linéaire Continu Invariant est stable si les pôles (racine du dénominateur) de sa fonction de transfert sont à partie réelle strictement négative.
Un système en Boucle Fermée (BF) à retour unitaire est stable si son équation caractéristique 1 + FTBO(s) =0 ne possède que des zéros à
partie réelle négative.
Point critique de stabilité (-1,0)
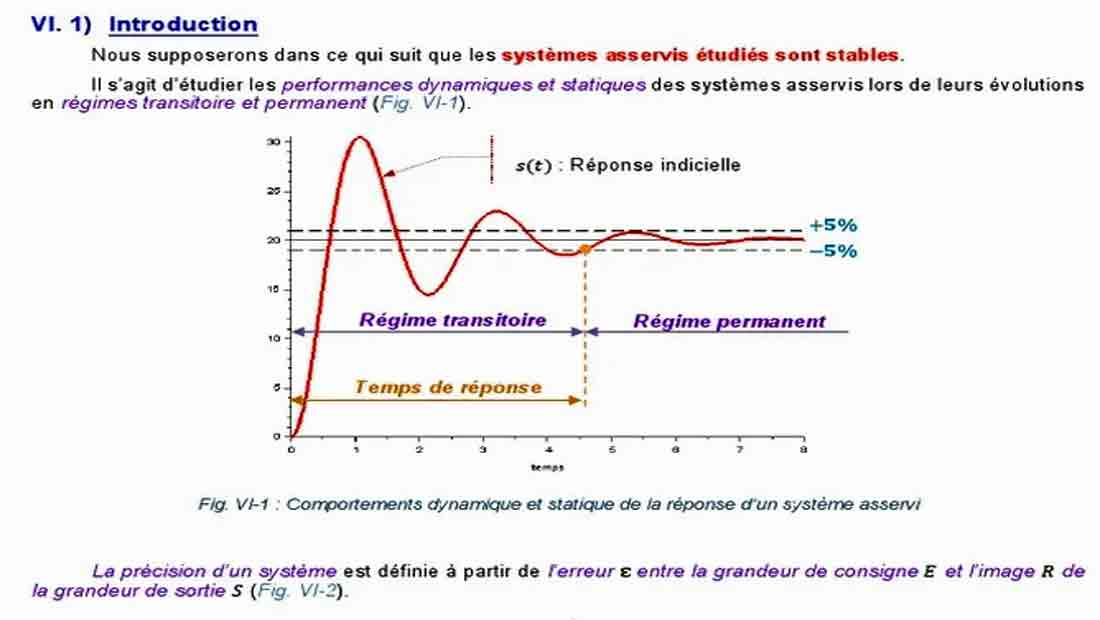
Lorsque un procédé asservi (en BF) entre en oscillations (signal de sortie sinusoïdal) pour une variation d’entrée
bornée ou même nulle, le procédé est à la limite de stabilité ( l’un des pôles ou deux pôles conjugués imaginaires purs s = ± jwc deviennent pôles de sa FTBF ou zéros de son équation caractéristique 1 + FTBF(p) = 0 . A noter que l’axe imaginaire est la frontière entre le plan gauche des pôles à parties réellenégative et le plan droit des pôles à parties réelle positive).
Dans ce cas wc , est la pulsation d’oscillation.
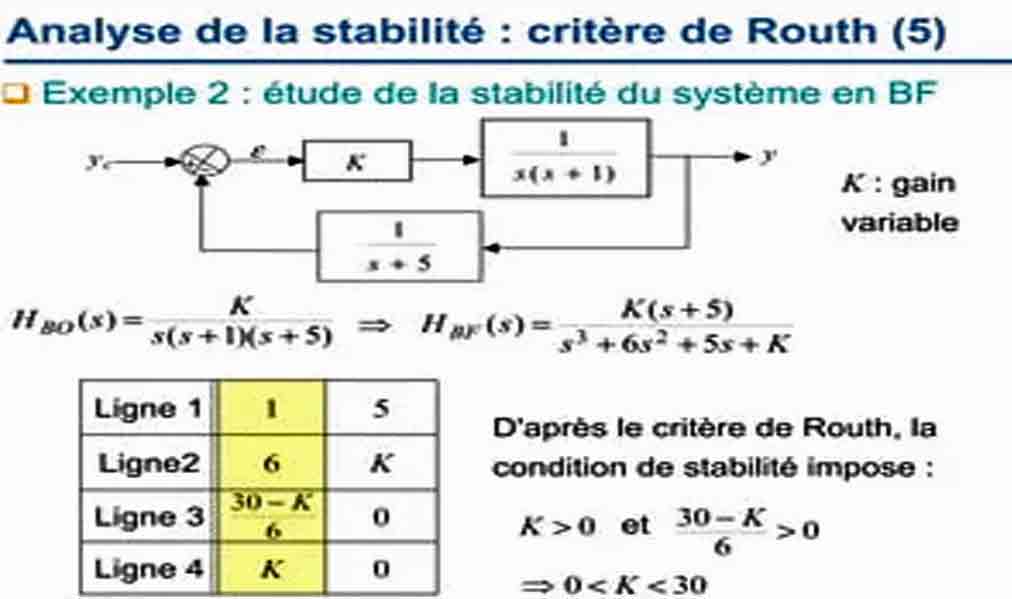
La résolution de l’équation caractéristique permet d’obtenir les conditions limites de stabilité (gain critique de boucle Kc)
Critère de Routh
Le critère de Routh permet de déterminer le nombre de racines d’un polynôme et donc les pôles de la FTBO ou de la FTBF ayant leurs parties réelles positives, sans calculer ces racines ou ces pôles.