Exercices corrigés : Réglage d’un correcteur PID
Un régulateur Proportionnel Intégral Dérivé (PID) est un organe de contrôle qui permet d’effectuer une régulation en boucle fermée d’un procédé industriel.
Le régulateur compare une valeur mesurée sur le procédé avec une valeur de consigne. La différence entre ces deux valeurs (le signal d’erreur) est alors utilisée pour calculer une nouvelle valeur d’entrée du process tandant à réduire au maximum l’écart entre la mesure et la consigne.
Contrairement aux algorithmes de régulation simples, le contrôle par PID peut ajuster les sorties du procédé, en fonction de l’amplitude du signal d’erreur, et en focntion du temps. Il donne des résultats plus précis et un contrôle plus stable. (Il est montré mathématiquement qu’une boucle PID donne un contrôle plus stable qu’un contrôle proportionnel seul et qu’il est plus précis que ce dernier qui laissera le procédé osciller).
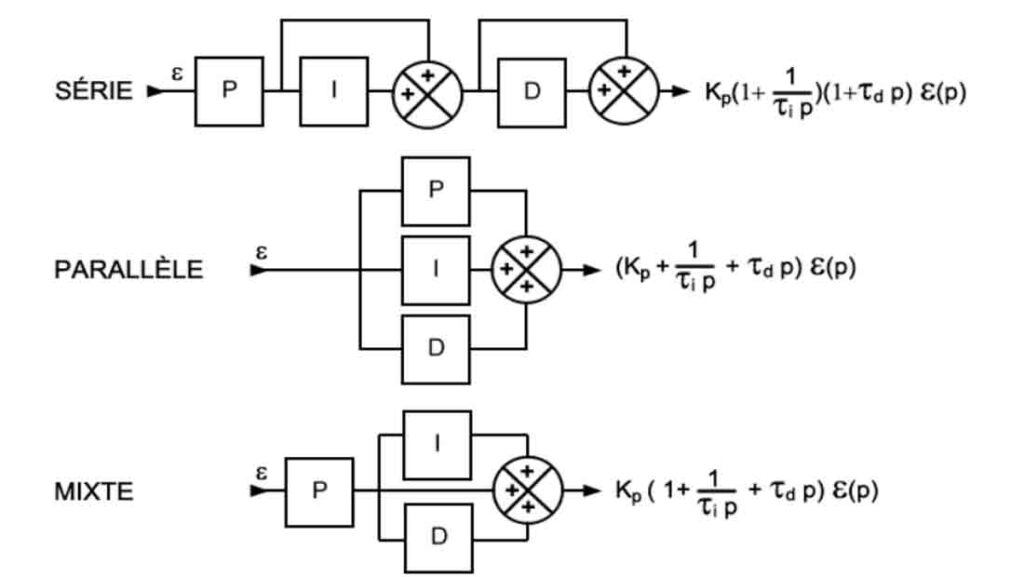
La commande du régulateur est donc à la fois proportionnelle à l’erreur, à la somme des erreurs et à
la variation de l’erreur.
commande = Kp * erreur + Ki * somme_erreurs + Kd * (erreur – erreur_précédente)
• Kp est le coefficient de proportionnalité de l’erreur à régler de façon manuelle.
• Ki est le coefficient de proportionnalité de la somme des erreurs. Il faut aussi le régler de
façon manuelle.
• Kd est le coefficient de proportionnalité de la variation de l’erreur. Il faut régler ce coefficient manuellement.
On rajoute donc à la commande générée par le régulateur proportionnel, la somme des erreurs commises au cours du temps.
La dérivée de l’erreur correspond à la variation de l’erreur d’un échantillon à l’autre et se calcule simplement en faisant la différence entre l’erreur courante et l’erreur précédente (c’est une approximation linéaire et locale de la dérivée).
Il faut effectuer une mesure sur le système pour calculer l’erreur et ainsi appliquer le PID. Cette mesure est à faire régulièrement à une certaine fréquence d’échantillonnage.
Exercices corrigés : Réglage d’un correcteur PID