Exercices Corrigés sur un système de second ordre
Fonction de Transfert
Un système asservi de second ordre peut être représenté par une fonction de transfert typique de la forme.
- ωn est la fréquence naturelle non amortie.
- ζ est le coefficient d’amortissement.
Réponse Temporelle
La réponse temporelle d’un système de second ordre est influencée par deux paramètres principaux :
- Fréquence Naturelle (ωn) : Détermine la rapidité du système.
- Coefficient d’Amortissement (ζ) : Influence la nature des oscillations et la stabilité du système.
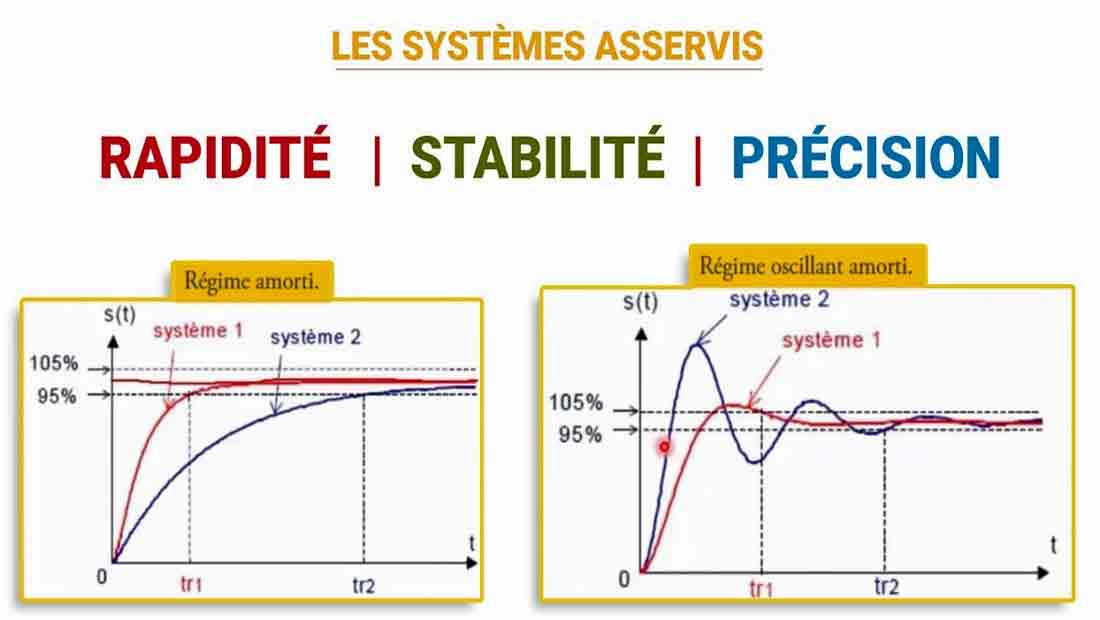
La réponse d’un système de second ordre à une entrée en échelon peut être classifiée en trois types basés sur ζ\zeta :
- Sous-amorti (0<ζ<10 ) : Réponse oscillatoire.
- Critiquement amorti (ζ=1) : Réponse rapide sans oscillations.
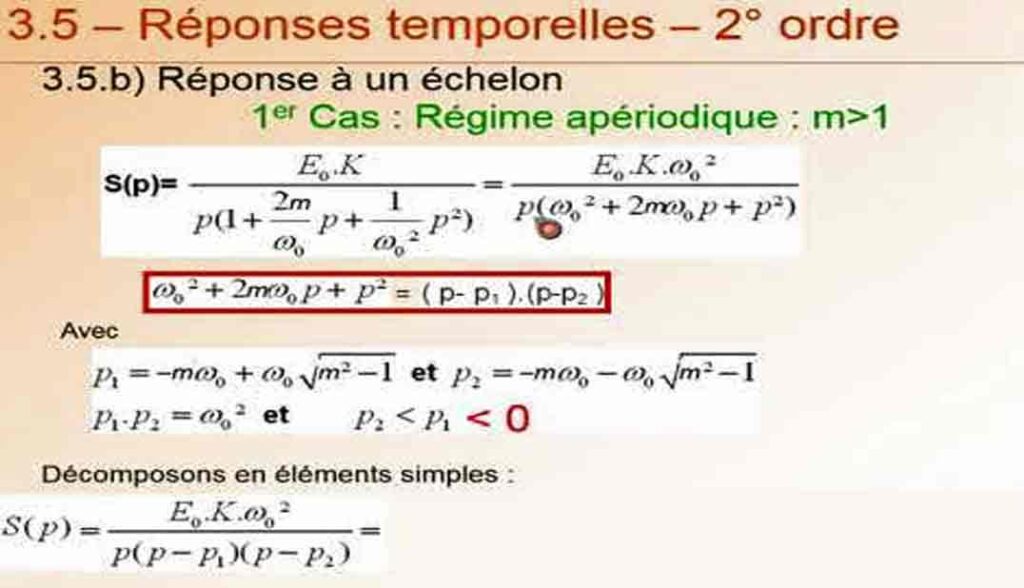
- Sur-amorti (ζ>1) : Réponse lente sans oscillations.
Paramètres de Réglage
1. Fréquence Naturelle (ωn)
La fréquence naturelle est liée à la vitesse de la réponse du système. Une valeur plus élevée de ωn\omega_n augmente la rapidité du système, mais peut également accroître les risques d’instabilité si le système est sous-amorti.
2. Coefficient d’Amortissement (ζ)
Le coefficient d’amortissement contrôle les oscillations et la stabilité du système. Un réglage précis de ζ est crucial pour obtenir une réponse souhaitée :
- Sous-amorti : Si ζ est trop bas, le système oscillera excessivement.
- Critiquement amorti : Valeur optimale où le système atteint la stabilité le plus rapidement sans oscillations.
- Sur-amorti : Si ζ est trop élevé, le système sera stable mais lent à réagir.
Méthodes de Réglage
1. Méthode d’Essai et Erreur
Cette méthode implique des ajustements progressifs des paramètres ωn\omega_n et ζ\zeta jusqu’à obtenir une réponse satisfaisante. Bien que simple, cette méthode peut être longue et ne garantit pas toujours une solution optimale.
2. Réglage par Analyse de la Réponse Temporelle
L’analyse de la réponse temporelle permet de calculer les paramètres idéaux en observant la réponse à une entrée en échelon. Les critères de performance couramment utilisés incluent le temps de montée, le temps de stabilisation, le dépassement et l’erreur statique.
3. Réglage par Placement des Pôles
Le placement des pôles consiste à déterminer les valeurs de ωn et ζqui placent les pôles du système à des emplacements spécifiques sur le plan complexe, optimisant ainsi la performance du système.
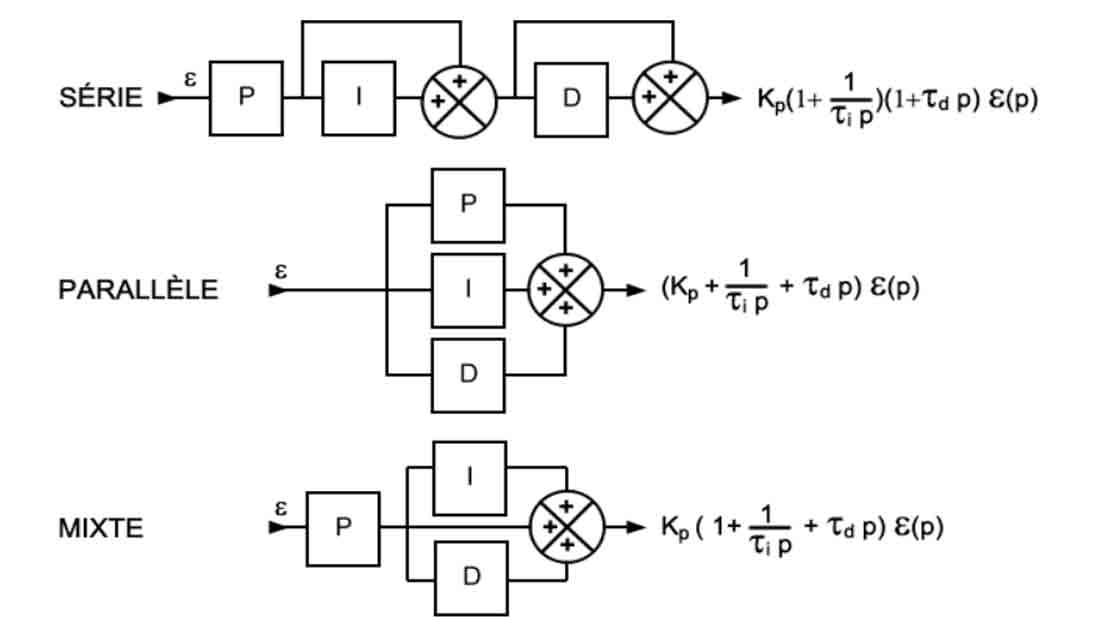
4. Utilisation de Correcteurs PID
Les correcteurs PID (Proportionnel-Intégral-Dérivatif) peuvent être utilisés pour ajuster dynamiquement les paramètres d’un système de second ordre. Le réglage des gains proportionnel (P), intégral (I) et dérivatif (D) permet de contrôler la rapidité et la stabilité du système.
Exercices Corrigés sur un système de second ordre